TI-S2
Linear actuator
Inhoud
v0.1.0 Start document voor lineaire actuator door HU IICT.
Een introductie
Electric Linear Actuators are a type of actuator that converts energy and signals into a linear motion. Mechanical linear actuators typically operate by conversion of rotary motion into linear motion. This linear motion is then used to tilt, lift, push or pull an object where force is required.
5V relais to drive 12V Linear actuator
Linear actuators typically operate on higher voltages. We use a 5V relais to operate a 12V relais from an Arduino UNO. We actually use two relais to switch the polarity and drive de linear actuator up and down.
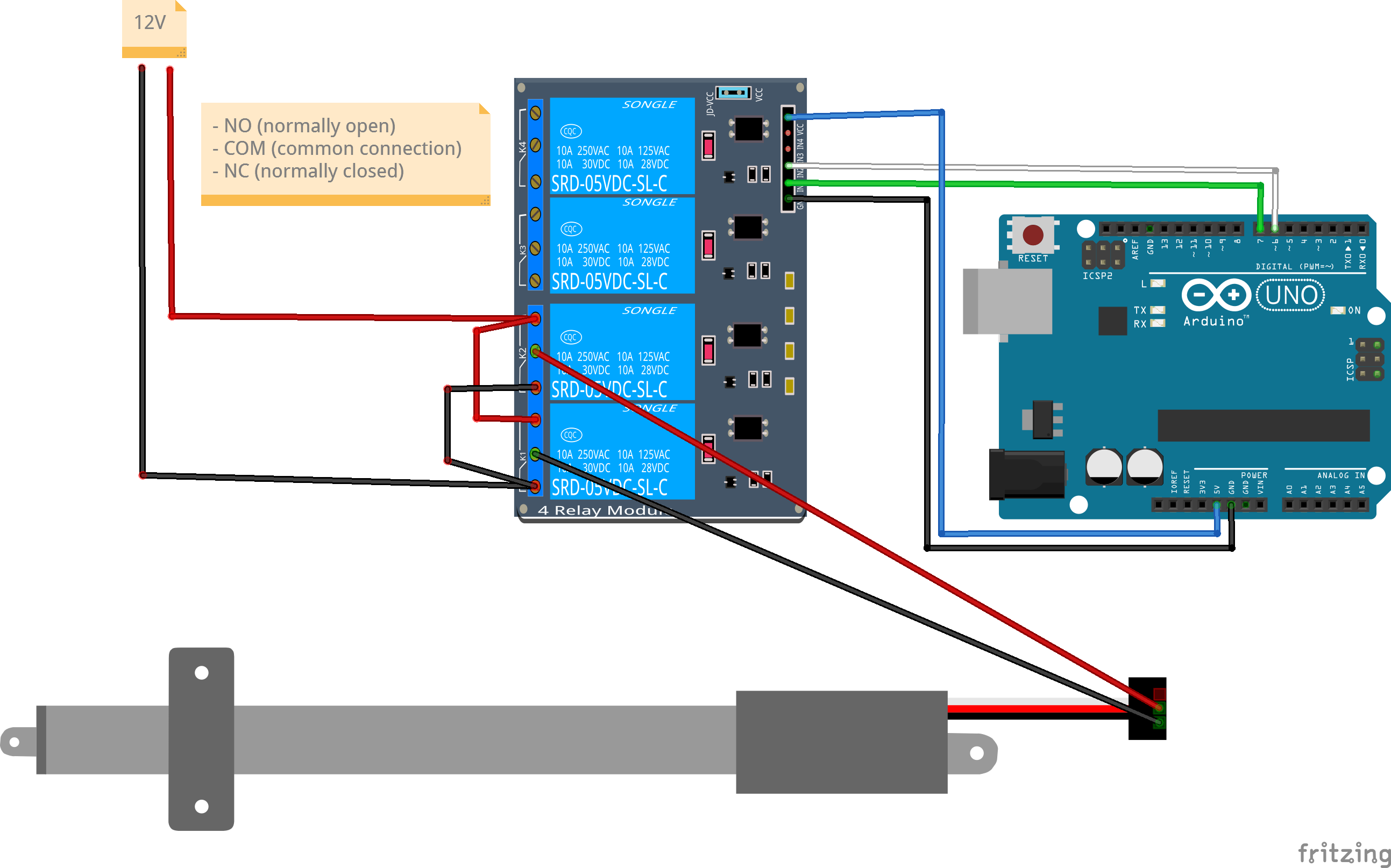
In motor contorol a H-bridge is often used to switch polarity in stead of a relais and PWM is then used for signal or controlling the current.
Duty Cycle
Many linear actuators have a duty cycle. To limit wear an tear you should obey them. When the Duty Cycle is 10% it means the possibility of continuous operation for one minute out of every ten minutes.
Arduino example
//assign relay INx pin to arduino pin
const int forwards = 7;
const int backwards = 6;
void setup() {
//set pin as output
pinMode(forwards, OUTPUT);
pinMode(backwards, OUTPUT);
}
void loop() {
//Activate the relay one direction
digitalWrite(forwards, LOW);
digitalWrite(backwards, HIGH);
delay(2000); // wait 2 seconds
//Deactivate both relays to brake the motor
digitalWrite(forwards, HIGH);
digitalWrite(backwards, HIGH);
delay(20000);// wait 20 seconds
//Activate the relay the other direction
digitalWrite(forwards, HIGH);
digitalWrite(backwards, LOW);
delay(2000);// wait 2 seconds
//Deactivate both relays to brake the motor
digitalWrite(forwards, HIGH);
digitalWrite(backwards, HIGH);
delay(20000);// wait 20 seconds
}
Referenties
- Linear actuator (https://en.wikipedia.org/wiki/Linear_actuator)